Programming PIC16F84A Software Delay Routines
by Lewis Loflin
Follow @Lewis90068157
See Programming PIC16F84A-PIC16F628A Interrupts Tutorial.
Software delay routines are useful and saves tying up hardware timers to be used for other purposes. The examples I've seen in Microchip PIC assembly are just confusing to modify and use. And often not accurate. Here I'll illustrate a more sane way to program software time days.
As shown in the video without delays the LED would appear to be on all the time.
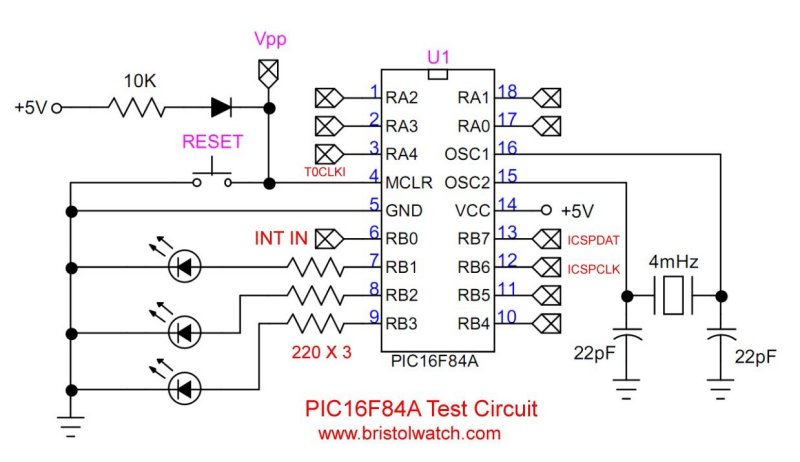
First, one must know the frequency of the oscillator crystal, which is divided by 4. With a 4mHz oscillator produces a period of 1 uSec for most instructions except branching and jump instructions.
;=========================================
; CLOCK: External 4MHz (instruction execution time: 1usec)
; This is a basic start template for PIC16F84A
; Includes delay routines
; Program name: 16F84A_software_delay.asm
; Date: 7-7-2024
; Author: Lewis Loflin
; MPLAB v8.92 compiler.
; Frequency = 1Hz.
;========================================
list p=16F84A
#include <p16F84A.inc>
errorlevel -302
; NOTE!!! Select proper chip for the compiler!
__CONFIG _CP_OFF & _PWRTE_ON & _WDT_OFF & _XT_OSC
;*****[ Data Storage Reg's ]*****
CBLOCK 0x0C ; Assign each reg. from Bank 0 RAM area.
CNT1
CNT2
CNT3
CNT4
B0
B1
B2
temp1
temp2
ENDC ; Conclude Bank 0 RAM assignments.
org 0 ;Setting Reset vector
goto setup ; RESET
org 0x04 ; interrupt
retfie ; return from interrupt
; main routine:
setup ; Program starts here !!!
banksel 1
; 1 = input, 0 = output
movlw b'11110001' ; portb, RB1-3 output, RB4-7, RA0 input
movwf TRISB ; set i/o configuration for portb
banksel 0
;jump back to bank 0 of pic.
clrf PORTB ;clear all i/o's of portb
main
movlw 0x02 ; xor (toggle) bit rb1 b'00000010'
xorwf PORTB, 1 ; 2 passes for each cycle
movlw .50 ; delay 50 * 10msec. = 0.5 sec
call wx10ms
goto main
; delay routines *************************************
; Calculating a 1mSec delay. 4mHz is divided by 4 internally to
; 1,000,000. Take reciprocal divide 1mSec by 1uSec = 1000.
; GOTO uses 2 cycles DECFSZ 1 cycle = 3 cycles or 3uSec.
; 3uSEC. * 82 * 4 = 1002uSec. or ~1mSec.
delay1ms
movlw D'4'
movwf CNT1
movlw D'82'
movwf CNT2
decfsz CNT2, F
goto $-1
decfsz CNT1, F
goto $-5
return
delay10ms
movlw .10
goto $+2 ; skip next
wx1ms ; W * 1mSec.
movwf CNT4
call delay1ms
decfsz CNT4, f
goto $-2
return
wx10ms ; W * 10mSec.
movwf CNT3
call delay10ms
decfsz CNT3, f
goto $-2
return
end ;End of source code.
- Operate PIC16F84A TMR0 from RA4/T0CKI Pulse Input
- Toggle ON-OFF LED Based on External Interrupt
- Programming PIC16F84A-PIC16f628a Timers by Example
- Programming PIC16F84A-PIC16F628A TMR0 Interrupts
- Programming PIC16F84A Software Delay Routines by Example
- YouTube videos:
- PIC16F84A-628A Hardware Time Delays
- PIC16F84A-628A Timer Interrupt Delays
- PIC16F84A-628A Pullups and Interrupts
- PIC16F84A-628A Hardware Interrupts Tutorial
- Microchip PIC related videos:
- How to Use K150 PIC Programmer
- Microchip PIC16F628A Basic H-Bridge Motor Control
- Microchip PIC16F628A Counts BCD on 8 LEDs
- PIC16F84A Operates H-Bridge Motor Control
- PIC16F84A Operates MOSFET H-Bridge
- Using Velleman K8048 PIC Development Board
- Arduino Port Registers Revisited
- Digispark ATtiny85 with MCP23016 GPIO Expander
- Safely Build Program a H-Bridge
- Build H-Bridge Motor Control Without Fireworks
- MOSFET H-Bridge for Arduino 2
- Microchip PIC16F84A H-Bridge Motor Control
- Microchip PIC16F628A Basic H-Bridge Motor Control
- PICAXE Operates H-Bridge Motor Controller
- PICAXE Microcontroller Controls Motor Speed - Direction
- PICAXE Projects
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.