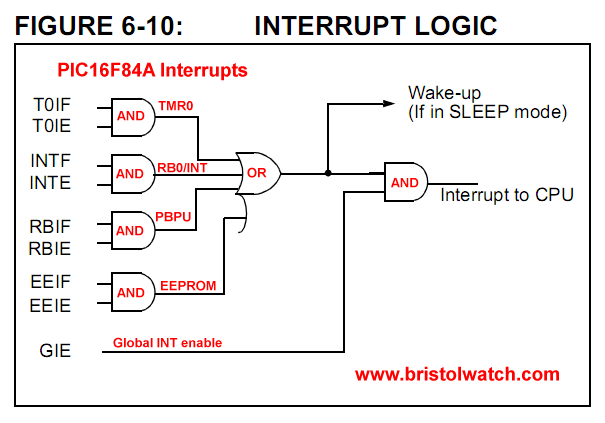
Fig. 1 PIC1684A interrupt map.
Programming PIC16F84A-PIC16F628A TMR0 Interrupts
by Lewis Loflin
Follow @Lewis90068157
We utilize TMR0 interrupts to increment a counter, then when reaching a select number the program toggles the state of a LED on PB0. this is very easy to program and we will walk through the steps.
;=======================================
; CLOCK: External 4MHz (instruction execution time: 1usec)
; This is a basic start template for PIC16F84A
; Includes delay routines
; Date: 6-16-2023
; Author: Lewis Loflin
; MPLAB v7.50 compiler.
; Tutor example file: 16F84lewisXOR.ASM
; Use TMR0 interrupts to toggle ON/OFF LED RB1 at 500 Hz.
; Actual TMR0 delay is 1mSec.
; LED on RB2 measured 5 Hz using software DELAY.
; Both should work together, software delay effected by TMR0
; The ISR saves and restores W and STATUS register.
; LED RB1 toggle ON/OFF at 5Hz using softeware delay.
; Both outputs were measured with a frequency counter.
;======================================
list p=16F84A
#include <p16F84A.inc>
errorlevel -302
__CONFIG _CP_OFF & _PWRTE_ON & _WDT_OFF & _XT_OSC
;*****[ Data Storage Reg's ]*****
CBLOCK 0x0C ; Assign each reg. from Bank 0 RAM area.
CNT1 ;Timer 1, Used for general delay.
CNT2 ;Timer 2, used for delay !
CNT3 ;Timer 2, used for delay !
TEMP ;Used to store pattern
w_temp ; variable used for context saving
status_temp ; variable used for context saving
ENDC ; Conclude Bank 0 RAM assignments.
ORG 0 ; Reset vector PIC16F84
GOTO setup ;Jump to setup
ORG 0x04 ; interrupt
MOVWF w_temp ; save off current W register contents
MOVFW STATUS ; move status register into W register
MOVWF status_temp ; save contents of STATUS register
MOVLW 0x02 ; a ONE in any bit position will toggle bit(s)
XORWF PORTB, F ; store back in portb
BCF INTCON, T0IF ; bit 2
MOVLW D'9'
MOVWF TMR0
MOVF status_temp, W ; retrieve copy of STATUS
MOVWF STATUS ; restore pre-isr STATUS
SWAPF w_temp,F ;Swap W_Temp
SWAPF w_temp,W ;Swap W_Temp into W
RETFIE ; return from interrupt
; **************************
; main routine:
setup ;Program starts here !!!
; BSF STATUS,RP0
BANKSEL TRISB
MOVLW B'11110000' ;Config PORTB, RB1-3 OUTPUT, RB0, RA4-7 INPUT
MOVWF TRISB ;Set I/O configuration for PORTB
MOVLW B'00000001' ; Enable TMR0, prescale 1:4
MOVWF OPTION_REG
; BCF STATUS,RP0 ;Jump back to bank 0 of PIC.
BANKSEL INTCON
MOVLW 0xA0 ; setup interrupts for TMR0
MOVWF INTCON
CLRF PORTB ;Clear all I/O's of PORTB
BCF INTCON, 2 ; CLR TMR0 IRQ flag
MOVLW D'9' ;
MOVWF TMR0 ; write TMR0 count begins.
;Loop starts here !!!
LOOP
MOVLW 0x01 ; toggle 2X for 500Hz.
XORWF PORTB, F ; F = 1 for file, W = 0 W register
CALL DELAY_100ms
GOTO LOOP
; ************************** ;Delay routine.
; Calculating a 1mSec delay. 4mHz is divided by 4 internally to
; 1,000,000. Take reciprocal divide 1mSec by 1uSec = 1000.
; GOTO uses 2 cycles DECFSZ 1 cycle = 3 cycles or 3uSec.
; 3 * 82 * 4 =~ 1000uSec. or 1mSec.
; if CNT1 = 40 then 10 mSEC. delay, 200 is 50 mSec. delay.
DELAY_1ms
; 4 mHz crystal
MOVLW D'4'
MOVWF CNT1
MOVLW D'82'
MOVWF CNT2
DECFSZ CNT2, F
GOTO $-1
DECFSZ CNT1, F
GOTO $-5
RETLW 0
DELAY_100ms
MOVLW D'100' ; value * DELAY_1ms
MOVWF CNT3
CALL DELAY_1ms
DECFSZ CNT3, F
GOTO $-2
RETLW 0
END ;End of source code.
The code is self-explanatory and is a combination of earlier coding. When TMR0 overflows the interrupt decrement CNT until it reaches zero. Otherwise most of the code is skipped (GOTO $+7), except the TMR0 interrupt flag is always cleared to 0. See the following:
- Operate PIC16F84A TMR0 from RA4/T0CKI Pulse Input
- Toggle ON-OFF LED Based on External Interrupt
- Programming PIC16F84A-PIC16f628a Timers by Example
- Programming PIC16F84A-PIC16F628A TMR0 Interrupts
- Programming PIC16F84A Software Delay Routines by Example
- YouTube videos:
- PIC16F84A-628A Hardware Time Delays
- PIC16F84A-628A Timer Interrupt Delays
- PIC16F84A-628A Pullups and Interrupts
- PIC16F84A-628A Hardware Interrupts Tutorial
- Microchip PIC related videos:
- How to Use K150 PIC Programmer
- Microchip PIC16F628A Basic H-Bridge Motor Control
- Microchip PIC16F628A Counts BCD on 8 LEDs
- PIC16F84A Operates H-Bridge Motor Control
- PIC16F84A Operates MOSFET H-Bridge
- Using Velleman K8048 PIC Development Board
- Arduino Port Registers Revisited
- Digispark ATtiny85 with MCP23016 GPIO Expander
- Safely Build Program a H-Bridge
- Build H-Bridge Motor Control Without Fireworks
- MOSFET H-Bridge for Arduino 2
- Microchip PIC16F84A H-Bridge Motor Control
- Microchip PIC16F628A Basic H-Bridge Motor Control
- PICAXE Operates H-Bridge Motor Controller
- PICAXE Microcontroller Controls Motor Speed - Direction
- PICAXE Projects
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.