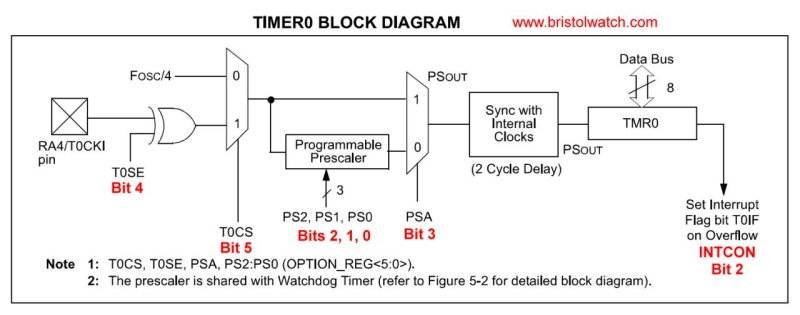
Fig. 1 TMR0 block diagram.
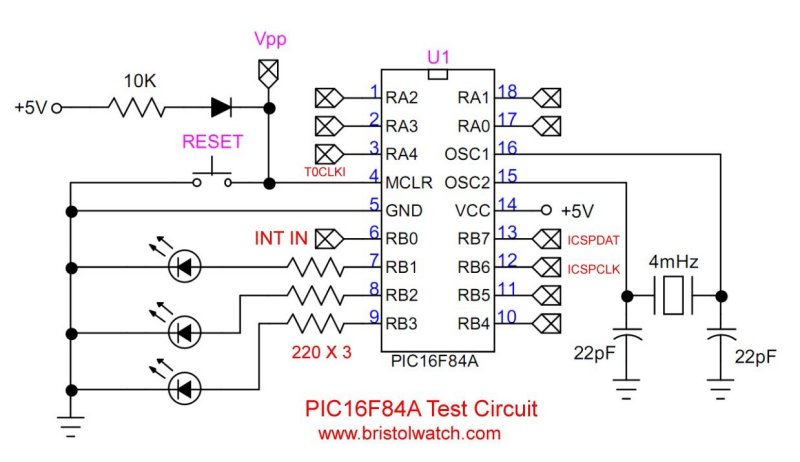
Operate PIC16F84A TMR0 from RA4-T0CKI Pulse Input
by Lewis Loflin
Follow @Lewis90068157
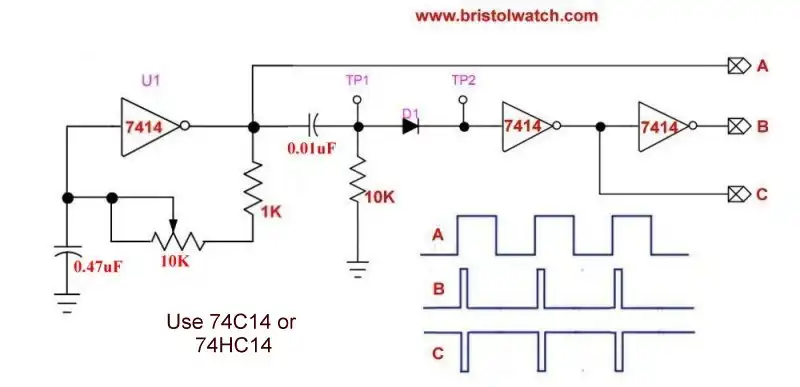
SN74HC14 based square wave generator with differentiator circuit.
The next section requires a square wave generator or source. This used the above setup one can build. See Simple Schmitt Trigger SN74HC14 Square Wave Generator
Connect either A or B to RA4 pin 3 on the PIC16F84A. With a frequency counter (a function on better digital volt meters) measure the input frequency.
This as a time base for TMR0. Adjust the input for 60Hz. With a TMR0 preload value of 225 the output will be a 1Hz square wave on LED RB1. Play with differing values of prelaod value and input frequency.
;============================================
; CLOCK: External 4MHz (instruction execution time: 1usec)
; This is a basic start template for PIC16F84A
; Includes delay routines
; Program name: Operate PIC16F84A TMR0 from RA4/T0CKI Pulse Input
; Test external 60Hz pulse input and 7414 pulse generator
; Date: 6/22/2024
; Author: Lewis Loflin
; LEDS connected to GRD RB1-RB3. Switch inputs RA0-RA2
;============================================
list p=16F84A
#include <p16F84A.inc>
errorlevel -302
__CONFIG _CP_OFF & _PWRTE_ON & _WDT_OFF & _XT_OSC
;===========================================
; define
LED1 EQU 1
LED2 EQU 2
LED3 EQU 3
;*****[ Data Storage Reg's ]*****
CBLOCK 0x0C ; Assign each reg. from Bank 0 RAM area.
CNT1
CNT2
CNT3
CNT4
FLAG
w_temp ; variable used for context saving W
status_temp ; variable used for context saving STATUS
ENDC ; Conclude Bank 0 RAM assignments.
;*******************************************
ORG 0x000 ; processor reset vector
goto setup ; go to beginning of program
ORG 0x004 ; interrupt vector location
movwf w_temp ; save off current W register contents
movf STATUS,w ; move status register into W register
movwf status_temp ; save off contents of STATUS register
; isr code can go here or be located as a call subroutine elsewhere
movf status_temp,w ; retrieve copy of STATUS register
movwf STATUS ; restore pre-isr STATUS register contents
swapf w_temp,f
swapf w_temp,w ; restore pre-isr W register contents
retfie ; return from interrupt
;**********************************************************************
setup
BSF STATUS,RP0 ;Jump to bank 1
; BANKSEL TRISA
MOVLW B'00011111' ;Config Port A, RA0 -> RA4 are inputs
MOVWF TRISA ;Set I/O configuration for PORTA
MOVLW B'11110001' ;Config Port B, RB1-3 OUTPUT, RB0, RB4-7 INPUT
MOVWF TRISB ;Set I/O configuration for PORTB
CLRF OPTION_REG
; setup TMR0 ext. clock source
; bit 5 source select 1 = Transition on RA4/T0CKI pin
BSF OPTION_REG, T0CS
; 0 = Increment on low-to-high transition on RA4/T0CKI pin
BCF OPTION_REG, T0SE
BSF OPTION_REG, PSA ; 1 = Prescaler is bypassed
BCF STATUS,RP0 ;Jump back to bank 0 of PIC.
; BANKSEL INTCON
CLRF INTCON
CLRF PORTA ;Clear all I/O's of PORTA
CLRF PORTB ;Clear all I/O's of PORTB
goto main
main
; INTCON bit 2 T0IF: TMR0 Overflow Interrupt Flag bit
; must be cleared in software
; 60Hz input no prescale
; because of the XOR toggle LED is divide by 2
; use TMR0 preload of 225 for 1 Hz pulse on LED
BCF INTCON, 2 ; CLR TMR0 Flag
MOVLW D'225' ; overflow after 60 counts = 1 Sec.
MOVWF TMR0 ; Load TMR0
BTFSS INTCON, 2 ; Wait for bit set
GOTO $-1
; count / 2
MOVLW 0x02
XORWF PORTB, F
goto main
end
- Operate PIC16F84A TMR0 from RA4/T0CKI Pulse Input
- Toggle ON-OFF LED Based on External Interrupt
- Programming PIC16F84A-PIC16f628a Timers by Example
- Programming PIC16F84A-PIC16F628A TMR0 Interrupts
- Programming PIC16F84A Software Delay Routines by Example
- YouTube videos:
- PIC16F84A-628A Hardware Time Delays
- PIC16F84A-628A Timer Interrupt Delays
- PIC16F84A-628A Pullups and Interrupts
- PIC16F84A-628A Hardware Interrupts Tutorial
- Microchip PIC related videos:
- How to Use K150 PIC Programmer
- Microchip PIC16F628A Basic H-Bridge Motor Control
- Microchip PIC16F628A Counts BCD on 8 LEDs
- PIC16F84A Operates H-Bridge Motor Control
- PIC16F84A Operates MOSFET H-Bridge
- Using Velleman K8048 PIC Development Board
- Microchip PIC16F84A H-Bridge Motor Control
- Microchip PIC16F628A Basic H-Bridge Motor Control
- PICAXE Operates H-Bridge Motor Controller
- PICAXE Microcontroller Controls Motor Speed - Direction
- PICAXE Projects
- Arduino Port Registers Revisited
- Digispark ATtiny85 with MCP23016 GPIO Expander
- Safely Build Program a H-Bridge
- Build H-Bridge Motor Control Without Fireworks
- MOSFET H-Bridge for Arduino 2
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.