PIC18F2550 Interfacing-Programming MAX7219 Display Controller
YouTube video: Programming the MAX7219 and 7-Segment Display
The following demonstrates the use of the MAX7219 display driver with a PIC18F2550 Microcontroller.
We demonstrate how to convert an integer to binary coded decimal along serial shift routines and how to program the MAX7219.
The MAX7219 is a serial input/output common-cathode display driver that interfaces microprocessors to a 7-segment numeric LED displays of up to 8 digits, bar-graph displays, or 64 individual LEDs.
Included on-chip are a BCD code-B decoder, multiplex scan circuitry, segment and digit drivers, and an 8x8 static RAM that stores each digit. Only one external resistor is required to set the segment current for all LEDs.
A convenient 4-wire serial interface connects to all common uPs. Individual digits may be addressed and updated without rewriting the entire display. The MAX7219 will also allow the user to select code- B decoding or no-decode for each digit.
The devices include a 150uA low-power shutdown mode, analog and digital brightness control, a scanlimit register that allows the user to display from 1 to 8 digits, and a test mode that forces all LEDs on.
- Related added Nov. 15, 2013:
- Arduino with Serially Interfaced MAX7219 Operates 8X8 LED Matrix
- Arduino RTC Clock with MAX7219 8-Digit LED Display
- BCD Conversion with Arduino Displayed on MAX7219
#include <p18cxxx.h> #include <delays.h> #define HIGH 1 #define LOW 0 #define CS PORTBbits.RB5 #define DATA_bit PORTBbits.RB6 #define SERCLK PORTBbits.RB7 #define delay_us Delay10TCYx // function declarations void ssrOut(unsigned char); void pulseCS(void); void init_MAX7219(void); void writeMAX7219(char, char); void delay_ms(int); void init_18F2250(void); // See c018i.c in your C18 compiler dir extern void _startup( void ); #pragma code _RESET_INTERRUPT_VECTOR = 0x000800 void _reset( void ) { _asm goto _startup _endasm } #pragma code int i, j, digit, count; void main() { init_18F2550(); init_MAX7219(); count = 9999; // convert to BCD send to MAXMAX7219 for (i=0; i<=count; i++) { j = i; // get 1st digit of j digit = j % 10; // MOD J writeMAX7219(1, digit); // get 2nd digit of j j = j / 10; digit = j % 10; // MOD j writeMAX7219(2, digit); // get 3rd digit of j j = j / 10; digit = j % 10; // MOD j writeMAX7219(3, digit); // get 4th digit of j j = j / 10; digit = j % 10; // MOD j writeMAX7219(4, digit); delay_ms(200); } // end for } //end main // shift data to MAX7219 // Rb7 -> SERCLK, Rb6 -> DATA_bit, Rb5 -> CS not void ssrOut(unsigned char val) { int j; for(j=1; j<=8; j++) { // shift out MSB first unsigned char temp = val & 0x80; // MSB out first if (temp == 0x80) DATA_bit = HIGH; // Rb6 DATA else DATA_bit = LOW; SERCLK = HIGH; delay_us(20); SERCLK = LOW; val = val << 1; // shift one place left } // next j } void writeMAX7219(char address, char data) { if ((address < 1) || (address > 8)) return; ssrOut(address); // valid numbers 1-8 ssrOut(data); pulseCS(); } void pulseCS(void) { CS = HIGH; delay_ms(1); CS = LOW; } void init_MAX7219(void) { CS = LOW; // CS NOT // set decode mode ssrOut(0x09); // address // ssrOut(0x00); // no decode ssrOut(0xFF); // 4-bit BCD decode eight digits pulseCS(); // set intensity ssrOut(0x0A); // address ssrOut(0x0D); // 5/32s pulseCS(); // set scan limit 0-7 ssrOut(0x0B); // address // ssrOut(0x07); // 8 digits ssrOut(0x03); // 4 digits pulseCS(); // clear MAX7219 all zeros // BCD mode all off otherwise for(i=1; i<=8; i++) { ssrOut(i); ssrOut(0x00); pulseCS(); } // set for normal operation ssrOut(0x0C); // address // ssrOut(0x00); // Off ssrOut(0x01); // On pulseCS(); } void delay_ms(int i) { long int j; for(j=0;j<i;j++) { Delay1KTCYx(12); //48 MHZ, DELAY OF 1 MS APPROX. } } //Ports initialized etc. void init_18F2250(void) { // disables converters A/D ADCON1=0x0F; // comparators off CMCON=7; //PORTB are outputs TRISB=0; // off LEDs PORTB=0; //Ra4,Ra5 are inputs Ra0,Ra1,Ra2,Ra3 outputs TRISA=0X30; //Rc0,Rc1 are inputs (MICRO SWITCHES) TRISC=0X0F; //select pull-up resistors on port B (Rb4...Rb7). INTCON2bits.RBPU=0; }
See How I got into Electronics
Videos, Links, Downloads for the PIC18F2550 BOLT
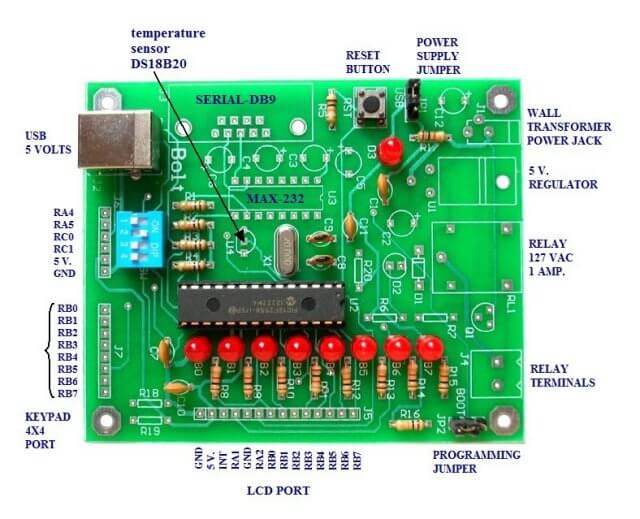
- Introducing the BOLT PIC18F2550 Microcontroller Board
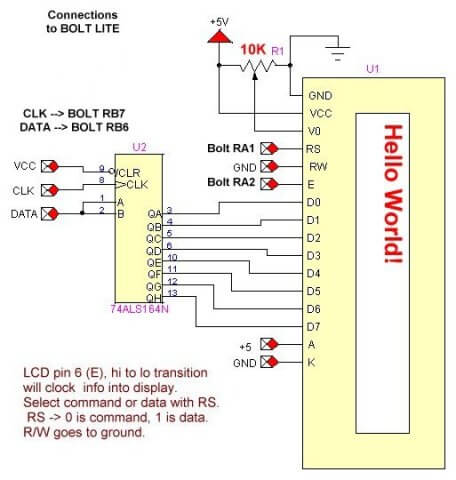
- PIC18F2550 BOLT with Serial LCD Display
- Using the MAX7219 with the 18F2550 Programs:
- MAX7219 Display Driver and a PIC Micro Controller
- MAX7219 Display Controller in the Non-Decode Mode with PIC
- Using TMR0 and Interrupts on the PIC18F2550
- YouTube Videos:
- My YouTube Channel
- MAX7219 display controller with 8X8 LED Matrix
- Programming the MAX7219 and 7-Segment Display
- Connecting PIC18F2550 to Parallel LCD Display
- Connecting PIC18F2550 to Serial LCD Displays
- Downloads:
- lewislcd.h My LCD H file
- Schematic Serial LCD
- BOLT_Template.zip
- Bolt Getting Started (pdf)
{kind=link}

- Assembly language projects using PIC16F628:
- Exploring the Microchip PIC in Assembly
- Using a Microchip PIC with TLC548 Serial ADC
- Controlling PIC Pulse Width Modulation with a Serial ADC
- Using TMR0 on a PIC with Interrupts
- External Clock Crystal with PIC16F628 TMR1 Generates Interrupt
- PIC Using Rotary Encoder to Operate Stepper Motor
- PIC16F628 Pulse Width Modulation Controls Brightness of LED
- Another way to Turn On-Off PWM in a PIC
- TLC548 Serial ADC Spec. Sheet
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.