Arduino DS1307 RTC Clock with MAX7219 LED Display Controller
by Lewis Loflin
YouTube video for this project: Arduino DS1307 RTC Clock with MAX7219 LED Display Controller
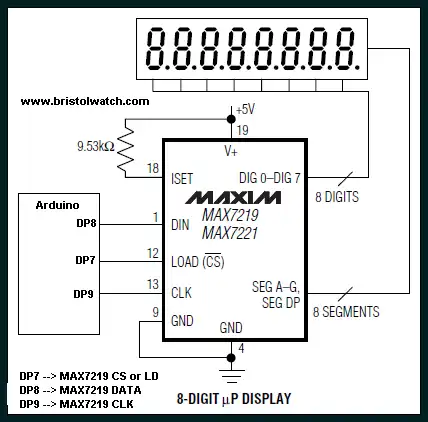
Date: Nov 15, 2013. In this project I make use of Ds1307 real time clock chip and a MAX7219 Serially Interfaced 8-Digit LED Display to build a clock. The clock will display hours, minutes, and seconds and through the use of three switches one can set the time.
This is an updated version of a clock routine written in 2009 that only used the Arduino compiler serial monitor. I've added an additional connection to data pin 2 on the Arduino to the 1 Hz output of the Ds1307 . By the use of polling DP2 the time is updated every second to the display controller and the DP13 LED state is toggled creating a visual indication.
The code was ported over from the old clock demo while the routines to operate the MAX7219 were developed and ported over from a PIC18F2550 project. While the clock data is read using I2C is already BCD as used by the MAX7219, the routines handling the output had to be totally rewritten.
Arduino code for this project: arduino_max7219b.txt
While all three programs share things in common, none are alike. The 8-digit display module was purchased off of Ebay.
See the Arduino DS1307 schematic.
{kind=link}
- Related:
- Using the ATMEGA168/Arduino with a Ds1307 Real Time Clock
- Arduino with Serially Interfaced MAX7219 Operates 8X8 LED Matrix
- BCD Conversion with Arduino Displayed on MAX7219
- Raspberry Pi Python RTC Interface MAX7219 Display Driver
- Raspberry Pi Interfacing 8-Digit LED MAX7219 Display Driver
- Quick navigation of this website:
- Basic Electronics Learning and Projects
- Basic Solid State Component Projects
- Arduino Microcontroller Projects
- Raspberry Pi Electronics, Programming
Stepper Motors
- Easy Driver Micro-Stepper Controller to Arduino
- Unipolar Stepper Motor with a Arduino
- Considerations for Using Stepper Motors
- Connecting the Arduino to a L298N H-Bridge
- L298N Motor Controller Theory and Projects
- TA8050 H-Bridge Motor Controller
- Battery Charger related:
- Solar Panel Charge Controller Using Arduino
- Solar Panel Battery Charge Controller Using Arduino
- Solar Panel Battery Charge Controller Switching Circuit
- Arduino AC Power Control Tutorial
- Rotary Encoder Using Arduino Hardware Interrupts
- Arduino Controlling 74C164 Shift Register
- Arduino Interface MC3479 Stepper Motor Controller
Serial LCD Display and assorted Sensors
- Arduino LCD Display using 74164 Shift Register
- Arduino LCD Display with DS18B20
- Arduino LCD Display with DHT11 Sensor
- Arduino with MM5451 LED Display Driver
- Arduino MAX7219 Operates 8X8 LED Matrix
- Arduino RTC Clock MAX7219 LED Display
- BCD Conversion with MAX7219
- Hatching Chicken Eggs with Arduino
- Arduino TMP37 Temperature Sensor
- Arduino TMP37 Temperature Sensor Tutorial
- Testing the Keyes IR Sensor Module with Arduino
- Arduino to MCP23016, LCD Display
- Time-Date with Arduino, LCD Display, DS1307 RTC
- Controlling Driveway Lights with the Arduino
- TSL230R Light to Frequency Converter
- Arduino with MCP23016 I/O Expander
- Arduino DS1307 Real Time Clock
- Arduino with 24LC08 Serial EEPROM
- MC3479 Stepper Motor Controller with Arduino
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.