Read-Write Arduino Microcontroller Through PC Printer Port Part 3
- Project pages:
- Part 1: Read Arduino with PC Printer Port
- Part 2: Better way to Read Arduino Through the PC Printer Port
- Part 3: Read-Write an Arduino Through a PC Printer Port
- Part 4: Control LCD Display and Arduino from the PC Printer Port
To use this one must setup their PC to use my modified pyparallel. See Programming the PC Printer Port in Python.
Arduino is programmed in a type of C and can operate a vast number of sensors and motors, but is worthless for high-level programming better done in Python.
So far we have wired two differing PC port configurations to read from Arduino. One Arduino sketch required a reset to update temperature reading with a DS18B20, read an ADC, etc. while the second example did a continuous read of Arduino.
Now we can do a read-write to Arduino so Arduino can execute commands and send back selected data or control electronics by command.
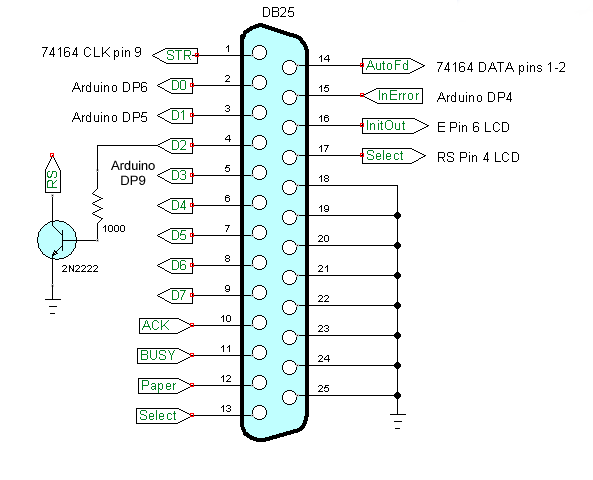
The problem with the serial write routine was to synchronize low-level compiled C in Arduino with a high-level interpreted language such as Python. I did this by using an interrupt routine to shift the serial data into Arduino. This was done by using D3 (pin 5) connected to Arduino DP2 - INT0.
The wiring diagram is shown above and was connected to an Arduino Nano - should work with any of them. Only pins 2-5 are used.
We have two test programs at the bottom to consider:
The first program calls function readAnalog0() which writes a code (0x5500) to Arduino to do an analog read of ADC 0 and send back the 10-bit result. (0-1023) The result is divided by 4 because it will be sent back to operate an 8-bit PWM control for Arduino DP9.
It then adds that 8-bit value to 0x5800 then writes it back again to Arduino that ANDs that 16-bit value with 0xFF to control the duty cycle of the pulse-width modulator (PWM) on Arduino DP9 to control the intensity of an LED.
In other word adjusting a pot on analog 0 on the Arduino controls the brightness of the LED.
while 1:
j = readAnalog0()
j = j / 4
writeArduino(0x5800 + j)
j = readArduino(.1) & 0xff
print "j = ", hex(j), " in HEX."
# print "j = ", convBinary(j), "in binary."
# print "j = ", j, "in decimal."
The second programs loops 20 times calling readDS18B20() and print the result in HEX, binary, and decimal. The function readDS18B20() in addition prints out the temperature in Celsius and Fahrenheit.
# Read DS18B20 temp sensor 20 times.
for k in range(0,20):
j = readDS18B20()
print "Reading number ", k
print "j = ", hex(j), " in HEX."
print "j = ", convBinary(j), "in binary."
print "j = ", j, "in decimal."
time.sleep(5)
This version can read any of the Arduino sketches but can only write to pportArduino3.ino.
- Arduino sketches needed by programs:
- pportArduino1.ino read only after reset.
- pportArduino2.ino reset once and multiple reads.
- pportArduino3.ino reset once read write Arduino infinite times - multiple commands.
- Related Raspberry Pi projects:
- Connect Serial LCD to Raspberry Pi
- Serial Read from Arduino to Raspberry Pi
- Arduino Raspberry Pi Interface with LCD Display
#!/usr/bin/env python
# File pportArduinoWrite.py
# http://www.bristolwatch.com/pport/index.htm
# By Lewis Loflin - lewis@bvu.net
# Read serial data from Arduino
# Same as TLC548 except 16 bit.
# This version use Data port bits D0-D3
# Can write control code to Arduino
# Data from Arduino displayed on terminal.
# SW1 is connected from ground to DB25 pin 10 and pulled high
# by a 10k resistor.
# Reset used with Arduino sketch
# pportArduino1.ino for each read.
# Reset used once for pportArduino2.ino
# then multiple reads.
# pportArduino3.ino is setup for read/write.
# Write a code then read back result
# in some case original code.
# 0x5600 blink LED on DP13 returns 0x5600
# 0x5500 analogRead(0) returns 0-1023
# 0x5700 DS18B20 temp sensor return integer
# 0x58XX PWM DP9 - X being 0 to 255 in HEX.
# Arduino returns 0x58XX
import parallel
import time
p = parallel.Parallel()
###############################################
# Reset Arduino to perform
# whatever reading if needed
# Delay 2 seconds after reset
def resetArduino():
writeD2(1)
time.sleep(.001)
writeD2(0)
time.sleep(3)
###############Connecting Arduino#############
# init i/o pins
p.setDataStrobe(0) # Pin 1 NC
p.setAutoFeed(0) # Pin 14 NC
p.setInitOut(1) # Pin 16 NC
p.setSelect(0) # Pin 17 NC
p.getInError() # Pin 15 input to DATA OUT Arduino DP4
# data LSB first
# enable CS1 HIGH
# set CLK HIGH
# read data bit shift left
# set CLK LOW
# repeat 15 times
# then once more after loop.
# last bit should not be shifted.
# Arduino
# define CLK 6
# define CS1 5
# define dataBit 4
# Pin 15 input to DATA OUT Arduino DP4
# Connect pport pin 2 to Arduino CLK DP6
def writeD0(bit_val):
if bit_val == 1:
p.setData(p.data() | 1) # set bit 0
else: # clear bit 0
p.setData(p.data() & (255 - 1))
return
# Connect pport pin 3 to Arduino CS1 DP5
def writeD1(bit_val):
if bit_val == 1:
p.setData(p.data() | 2) #set bit 1
else: # clear bit 1
p.setData(p.data() & (255 - 2))
return
# Connect pport pin 4 to Arduino Reset
def writeD2(bit_val):
if bit_val == 1:
p.setData(p.data() | 4) #set bit 1
else: # clear bit 1
p.setData(p.data() & (255 - 4))
return
# Connect pport pin 5 to Arduino DP2
def writeD3(bit_val):
if bit_val == 1:
p.setData(p.data() | 8) #set bit 1
else: # clear bit 1
p.setData(p.data() & (255 - 8))
return
# init Arduino:
writeD0(0) # Arduino DP6 CLK for read data for write
writeD1(0) # Arduino CS1 DP5
writeD2(0) # Arduino Reset
writeD3(0) # Arduino DP2 IRQ CLK for write
#################Write Arduino#######################
# MSB out first!
def writeArduino(value):
writeD3(1) # tell Arduino write is coming
writeD1(1) # CS1 HIGH
for x in range(0,15):
temp = value & 0x8000
if temp == 0x8000:
writeD0(1) # set data bit HIGH
else:
writeD0(0)
value = value << 0x01 # shift left
time.sleep(.001)
writeD3(0)
# time.sleep(.001)
writeD3(1)
temp = value & 0x8000
if temp == 0x8000:
writeD0(1)
else:
writeD0(0)
writeD1(0)
writeD3(0)
return
###################Read Arduino######################
# DelayT is used to pause after enable CS
# for sensor to upsate. Delay should be
# 0.5 Sec. for DS18B20 to cycle through.
# 0.1 for everything else.
def readArduino(delayT):
temp = 0
writeD1(1) # enable CS
time.sleep(delayT)
for i in range(0,15): # loop here 7 times
writeD0(1) # CLK HIGH
time.sleep(.001)
temp = temp + p.getInError() # get bit
temp = temp << 1 # shift 1 bit left
writeD0(0) # CLK LOW
writeD0(1) # CLK HIGH
time.sleep(.001)
temp = temp + p.getInError() # get bit 8
writeD0(0) # CLK LOW
writeD1(0) # CS LOW
return temp
#####################################################
# Print a 16-bit number (integer) in binary.
# Returns string.
# unlike python bin() this doesn't drop leading zeros
def convBinary(value):
binaryValue = '0b'
for x in range(0, 16):
temp = value & 0x8000
if temp == 0x8000:
binaryValue += '1'
else:
binaryValue += '0'
value = value << 1
return binaryValue
####################################################
# SW1 is connected from ground to DB25
# pin 10 and pulled high by a 10k resistor.
def SW1():
return p.getInAcknowledge()
# check pin 10 DB25 when pressed returns 0
def degC(val): # convert value DS18B20 read
return val * 0.0625
def degF(val): # convert value DS18B20 read
return (val * 0.0625) * 9 / 5 + 32
def readDS18B20():
print "Please wait for T reading..."
writeArduino(0x5700)
Treading = readArduino(.5) # delay .5 sec. DS18B20
print degC(Treading), "deg. C"
print degF(Treading), "deg. F"
return Treading
def readAnalog0():
writeArduino(0x5500)
return readArduino(.1)
# play with these commands:
# pportArduino3.ino is setup for read/write.
# Write a code then read back result.
# 0x5600 blink LED on DP13 returns 0x5600
# 0x5500 analogRead(0) returns 0-1023
# 0x5700 DS18B20 temp sensor return integer
# 0x58XX PWM DP9 - X being 0 to 255 in HEX.
# Arduino returns 0x58XX
resetArduino()
# Comment out one of the following two
# test programs.
# program below reads Arduino Analog0
# then writes it back to PWM and LED on
# DP9.
while 1:
j = readAnalog0()
j = j / 4
writeArduino(0x5800 + j)
j = readArduino(.1) & 0xff
print "j = ", hex(j), " in HEX."
# print "j = ", convBinary(j), "in binary."
# print "j = ", j, "in decimal."
# Read DS18B20 temp sensor 20 times.
for k in range(0,20):
j = readDS18B20()
print "Reading number ", k
print "j = ", hex(j), " in HEX."
# print "j = ", convBinary(j), "in binary."
print "j = ", j, "in decimal."
time.sleep(5)
print "Exit now."
exit
Download pport-1.0.iso from Sourceforge.com then burn to DVD (file size 920 meg.), insert into DVD drive and reboot. Make sure PC is set to boot from DVD ROM.
This is pre-configured by myself to use Python to control the printer port. Python can be run from IDLE or Geany.
All of my PPORT electronics projects will work without installation to a PC.
Programs can be saved to thumb drive in LIVE mode.
Projects
Below are listed a series of projects using pyparallel and electronics. Starting with routines I wrote to aid students I'd advise walking through this in sequence. Have fun and send comments and/or corrections to lewis@bvu.net.
- Introduction to Python Bitwise Operations
- Python Bitwise Operations by Example
- Using the PC Printer Port series:
- Programming the PC Printer Port in Python
- Additional Commands for Py-Parallel
- Controlling Data Bits on the PC Parallel Port
- Connecting Switches to the PC Printer Port with Python
- Reading an Analog Voltage Through the PC Printer Port Part 1
- Reading an Analog Voltage Through the PC Printer Port Part 2
- Controlling a Serial LCD Display on a PC Printer Port with Python
- Serial ADC and LCD Display with PC Printer Port with Python
- Controlling MAX7219 LED Display with PC Printer Port with Python
- MAX7219 8-Digit LED Display and Serial ADC in Python
- Project pages:
- Part 1: Read Arduino with PC Printer Port
- Part 2: Better way to Read Arduino Through the PC Printer Port
- Part 3: Read-Write an Arduino Through a PC Printer Port
- Part 4: Control LCD Display and Arduino from the PC Printer Port
- Arduino sketches needed by programs:
- pportArduino1.ino read only after reset.
- pportArduino2.ino reset once and multiple reads.
- pportArduino3.ino reset once read write Arduino infinite times - multiple commands.
- Related Raspberry Pi projects:
- Connect Serial LCD to Raspberry Pi
- Serial Read from Arduino to Raspberry Pi
- Arduino Raspberry Pi Interface with LCD Display
Linux Videos
- Live Linux Distro for Using Printer Port with Electronics
- Using the powerful Rox-Filer system in Linux
- Use FEH under Linux for a Wallpaper Setter
- How to create Symbolic links in Linux
- Printer Port Interfacing Videos:
- Connect Electronics to PC printer Port with Python
- Setup PC Printer Port with Python-Linux
- Use PC Printer Port to Read Analog Voltage
- Read-Write Arduino ADC PWN with Printer Port
- Printer Port to Serial LCD Display
- Connect Arduino to PC Printer Port for advanced control
Printer Port in C
- Exploring Digital Computer Electronics
- Hardware Review Connecting PC Parallel Ports
- Operation TB6600 Stepper Controller with PC Parallel Port
- Build or Buy Parallel Port Breakout Board?
- Build Serial HD44780 LCD Display Connect to Parallel Port
- Motherboards
- Presario 1999 CM1001 Gaming Computer Salvage
- Live Test 2002 VIA EPIA-800 Mini ITX Motherboard
- Salvage, Test 2012 AAEON EMB-B75A Industrial Motherboard
- Web Master
- Gen. Electronics
- YouTube Channel
- Arduino Projects
- Raspberry Pi & Linux
- PIC18F2550 in C
- PIC16F628A Assembly
- PICAXE Projects
Web site Copyright Lewis Loflin, All rights reserved.
If using this material on another site, please provide a link back to my site.